JNER:机器人辅助步态训练对亚急性卒中患者运动功能的影响
2023-01-25 网络 网络 发表于上海

中风仍然是全球死亡率和发病率的主要原因。运动障碍导致的功能残疾是中风后最常见的问题。大约60%的患者在中风后立即失去行走能力,20%的患者在1年后仍然无法独立行走。中风患者的行走能力直接影响他们的生活
中风仍然是全球死亡率和发病率的主要原因。运动障碍导致的功能残疾是中风后最常见的问题。大约60%的患者在中风后立即失去行走能力,20%的患者在1年后仍然无法独立行走。中风患者的行走能力直接影响他们的生活质量;因此,恢复行走能力是康复的关键目标。机器人辅助步态训练(RAGT)被引入作为一种改善步行恢复的新疗法。RAGT结合物理疗法提高了步态速度,并增加了参与者能够独立行走的几率。与单独物理治疗相比,这种改善对临床功能结果和步态模式具有有益的影响。
RAGT和对照组均表现出临床改善,如6分钟步行试验、改良的下肢Ashworth量表(MAS-AL)、受影响下肢Motricity指数、躯干控制试验、功能性步行分类(FAC)、10米步行试验、修正的Barthel指数和步行障碍量表所示,两组之间无显著差异。对不同类型RAGT的临床效果的研究得出了不一致的结果,并且很少进行后续检查。因此,本研究使用RAGT系统进行了RCT(随机对照实验),并进行了3个月的随访,以探讨亚急性中风患者的治疗效果(下肢运动功能、平衡和步态)。本研究发表在神经工程和康复杂志上。

招募了40名亚急性卒中患者,他们被同等随机分为两组,一组接受常规康复治疗,另一组接受15次RAGT治疗。使用以下工具评估了下肢运动功能、平衡和步态表现:活动范围(AROM)、手动肌肉测试(MMT)、Fugl-Meyer评估(FMA)下肢分量表(FMA-LE)和总分(FMA-total)、中风姿势评估量表(PASS)、伯格平衡量表(BBS)、Tinetti面向性能的移动性评估(POMA)平衡和步态分量表,以及3米和6米步行速度和定时起身(TUG)测试。这些测量在干预前后和3个月随访时进行。
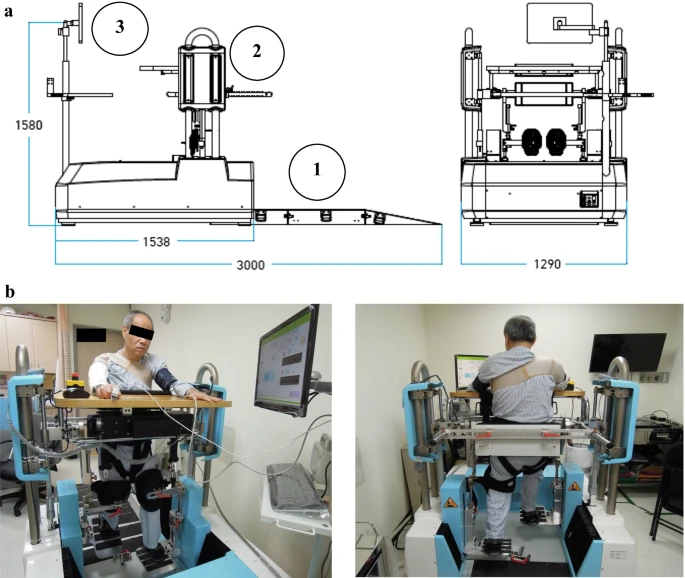
RAGT系统设计
在RAGT和常规住院康复后,参与者的日常生活能力有所提高。干预前BI(RAGT:29.3 ± 18.4,对照:33.0 ± 13.8),干预后(RAGT:47.3 ± 23.3,控制:50.3 ± 22.8)和3个月随访(RAGT:75.0 ± 25.4,对照:74.5 ± 23.3)组间无显著差异(p = 0.73)。在3个月的随访中,记录了参与者是否继续接受康复治疗,以检查效果的持续性。在3个月的随访中,RAGT组的16名参与者(80%)和对照组的17名参与者(85%)继续接受康复治疗,无显著差异。两组的麻痹腿BS均增加,但组间差异在任何时间点均不显著:干预前(RAGT:2.6 ± 1.0,对照:2.8 ± 0.8),干预后(RAGT:3.3 ± 0.9,对照:3.4 ± 0.7)和3个月随访(RAGT:3.9 ± 1.0,对照:3.7 ± 0.7)(p = 0.24)。

研究流程
RAGT组中改善到独立行走状态的参与者数量(n = 7) 高于对照组(n = 3) ,表明RAGT在促进3个月随访时的独立活动功能恢复方面比常规训练更有效。从干预后到3个月随访,RAGT和对照组POMA步态评分的不同变化也表明了RAGT的有益效果。RAGT组从干预后到3个月随访,POMA步态评分有所改善,但在对照组有所下降,差异接近显著水平。结果表明,这种新型RAGT有助于改善中风后严重下肢瘫痪患者的步态表现,干预后效果持续3个月。
总之,在亚急性卒中后3个月的随访中,RAGT对下肢运动功能能够产生有益的影响。
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言